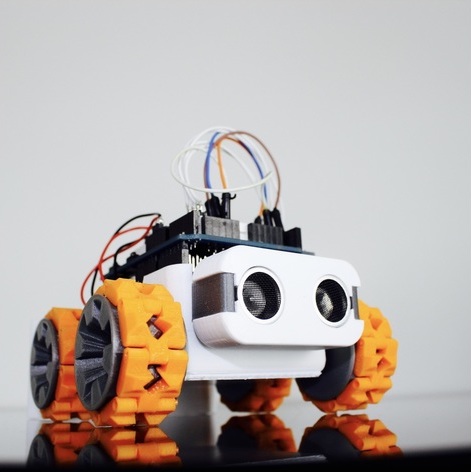
Le SMARS est un robot à quatre roues en chenilles (2 roues motrices) équipé d’un capteur à ultrason et initié en 2016 par un étudiant suisse, Kevin Thomas.
Pour sa partie « carrosserie », le SMARS est intégralement imprimé en 3D. Les fichiers prêts à l’emploi sont fournis, mais pas les originaux (le projet est sous copyright). Le design des divers éléments étant expliqué, il est néanmoins possible de refaire les pièces à l’identique sous Freecad par exemple.
Il est aussi possible de trouver des modèles adaptés à imprimer en 3D sur Thingiverse.
En ce qui concerne la partie électronique, le SMARS s’appuie comme souvent sur de l’arduino, couplé à un bloc moteur chinois à 2€… Mais il existe aussi une version raspberry pico, couplée à un classique pont en H L298N moins documentée.
Le SMARS est un projet intéressant dans le sens où il y a aussi une partie pas à pas sur l’assemblage du robot et quelques tutos sur la programmation. Même s’il n’est pas libre, il donne de bonnes idées sur la partie design d’un petit robot et sur l’emploi de chenilles imprimées en 3D en tpu.